CSI-драйвер csi-nfs — это реализация стандарта Container Storage Interface (CSI) для управления NFS-томами в Deckhouse Kubernetes Platform (DKP).
Архитектура драйвера
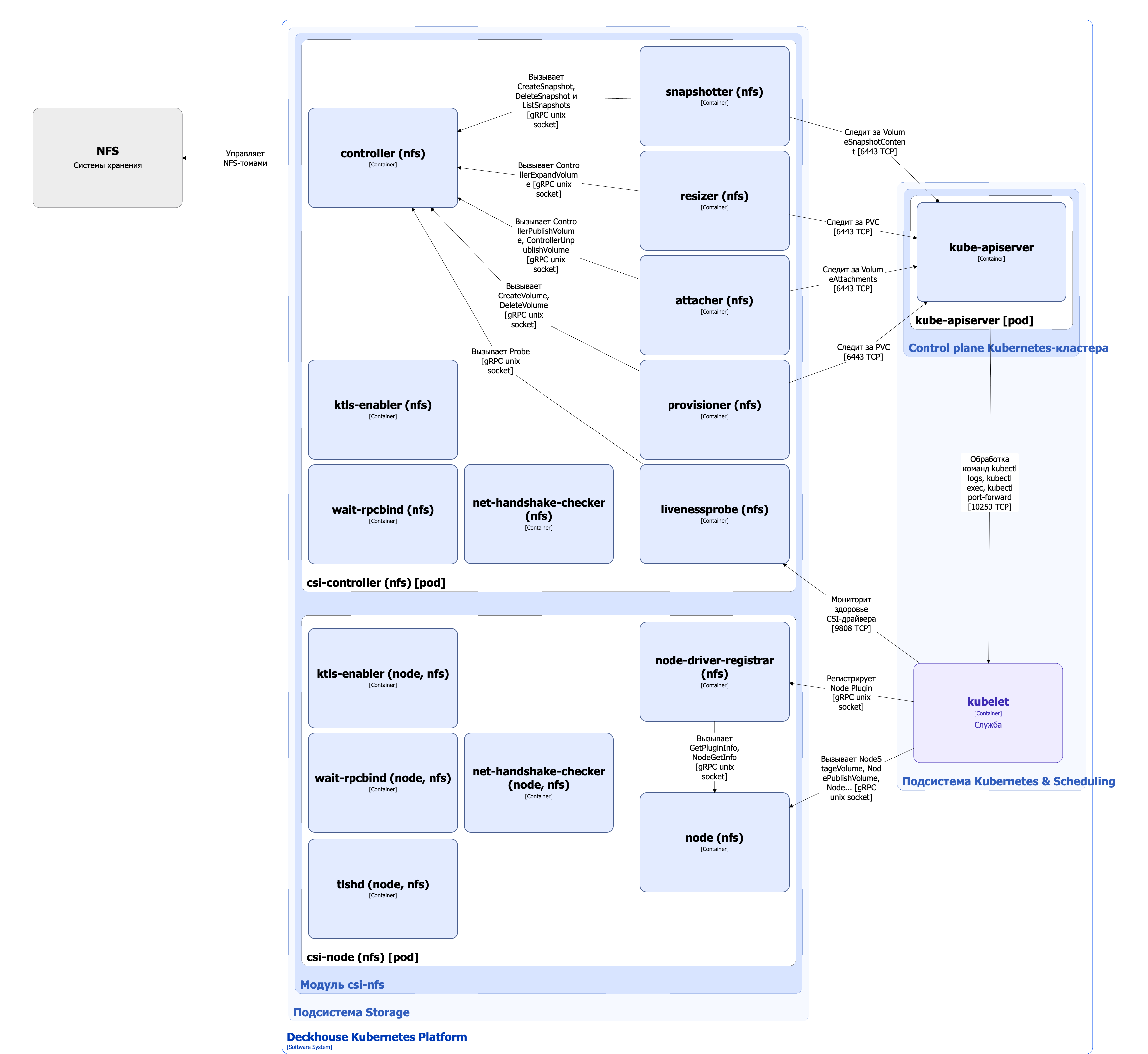
Для упрощения схемы приняты следующие допущения:
- На схеме показано, что контейнеры разных подов взаимодействуют друг с другом напрямую. Фактически они взаимодействуют через соответствующие сервисы Kubernetes (внутренние балансировщики). Названия сервисов не указываются, если они очевидны из контекста. В остальных случаях название сервиса указано над стрелкой.
- Поды могут быть запущены в нескольких репликах, однако на схеме все поды изображены в одной реплике.
Архитектура CSI-драйвера csi-nfs на уровне 2 модели C4 и его взаимодействия с другими компонентами Deckhouse Kubernetes Platform (DKP) изображены на следующей диаграмме:
Компоненты драйвера
CSI-драйвер csi-nfs состоит из следующих компонентов:
-
Csi-controller (Deployment) — Controller Plugin, отвечающий за глобальные операции с томами: создание и удаление, подключение и отключение от узлов, а также управление снимками.
Состоит из следующих контейнеров:
-
wait-rpcbind — init-контейнер, ожидающий доступности Unix-сокета службы
rpcbind; -
ktls-enabler — init-контейнер, выполняющий загрузку и проверку модулей ядра Linux на узле для работы в режиме RPC-with-TLS;
-
net-handshake-checker — init-контейнер, выполняющий однократный запуск
tlshdдля проверки работоспособности процедуры TLS handshake на уровне ядра ОС; -
controller — основной контейнер, реализующий функциональность CSI-драйвера (capabilities) в виде gRPC-сервисов Identity Service и Controller Service согласно спецификации CSI;
-
сайдкар-контейнеры контроллера — поддерживаемые сообществом Kubernetes внешние контроллеры (external controllers).
Они необходимы, поскольку persistent volume controller, запущенный в kube-controller-manager (компонент control plane кластера DKP), не имеет интерфейса взаимодействия с CSI-драйверами. Внешние контроллеры следят за ресурсами PersistentVolumeClaim и вызывают соответствующие функции CSI-драйвера в контейнере controller. Они также выполняют служебные функции, такие как получение информации о плагине и его capabilities или проверка состояния драйвера (liveness probe).
Внешние контроллеры взаимодействуют c контейнером controller по gRPC через Unix-сокеты.
В csi-controller входят следующие внешние контроллеры:
-
provisioner (external-provisioner) — отслеживает ресурсы PersistentVolumeClaim и вызывает RPC
CreateVolumeилиDeleteVolume. Также использует RPCValidateVolumeCapabilitiesдля проверки совместимости; -
attacher (external-attacher) — отслеживает ресурсы VolumeAttachment после того, как под запланирован на узел, а также подключает и отключает тома через RPC
ControllerPublishVolumeиControllerUnpublishVolume; -
resizer (external-resizer) — отслеживает обновления ресурсов PersistentVolumeClaim, расширяет тома с помощью RPC
ControllerExpandVolume, если пользователь запросил больше дискового пространства для PVC и драйвер поддерживает capabilityEXPAND_VOLUME; -
snapshotter (external-snapshotter) — работает совместно с модулем
snapshot-controller, следит за ресурсами VolumeSnapshotContent, а также управляет снимками томов через RPCCreateSnapshot,DeleteSnapshotиListSnapshots(если драйвер это поддерживает); -
livenessprobe — отслеживает состояние CSI-драйвера через RPC
Probeиз Identity Service и предоставляет HTTP-эндпоинт/healthz, за которым следит kubelet. При неуспешной livenessProbe kubelet перезапускает под csi-controller.
-
-
-
Csi-node (DaemonSet) — Node Plugin, работающий на узлах кластера с лейблом
storage.deckhouse.io/csi-nfs-nodeи отвечающий за локальное монтирование и размонтирование томов.У плагина есть привилегированный доступ к файловой системе каждого узла. В Linux для этого требуется capability
CAP_SYS_ADMIN. Это необходимо для выполнения операций монтирования и работы с блочными устройствами.Состоит из следующих контейнеров:
-
wait-rpcbind — init-контейнер, ожидающий доступности Unix-сокета службы
rpcbind; -
ktls-enabler — init-контейнер, выполняющий загрузку и проверку модулей ядра Linux на узле для работы в режиме RPC-with-TLS;
-
net-handshake-checker — init-контейнер, выполняющий однократный запуск
tlshdдля проверки работоспособности процедуры TLS handshake на уровне ядра ОС; -
node — основной контейнер, реализующий функции CSI-драйвера в виде gRPC-сервисов Identity Service и Node Service согласно спецификации CSI;
-
tlshd — сайдкар-контейнер, обеспечивающий работу в режиме RPC-with-TLS;
-
node-driver-registrar — сайдкар-контейнер, регистрирующий Node Plugin в kubelet. Вызывает в контейнере node RPC
GetPluginInfoиNodeGetInfo, чтобы получить информацию о плагине и узле. Взаимодействуют c контейнером node по gRPC через Unix-сокет.
-
Взаимодействия драйвера
Драйвер взаимодействует со следующими компонентами:
-
Kube-apiserver — мониторинг ресурсов PersistentVolumeClaim, VolumeAttachment и VolumeSnapshotContent.
-
Сетевое файловое хранилище NFS:
- подключение и отключение NFS-томов от узлов;
- управление снимками.
С драйвером взаимодействуют следующие внешние компоненты:
-
- проверяет livenessProbe CSI-драйвера;
- регистрирует Node Plugin;
- вызывает RPC
NodeStageVolume,NodeUnstageVolume,NodePublishVolume,NodeUnpublishVolumeиNodeExpandVolumeв Node Plugin.
Kubelet взаимодействует с Node Plugin по gRPC через Unix-сокет.